Fire Fighting Robot
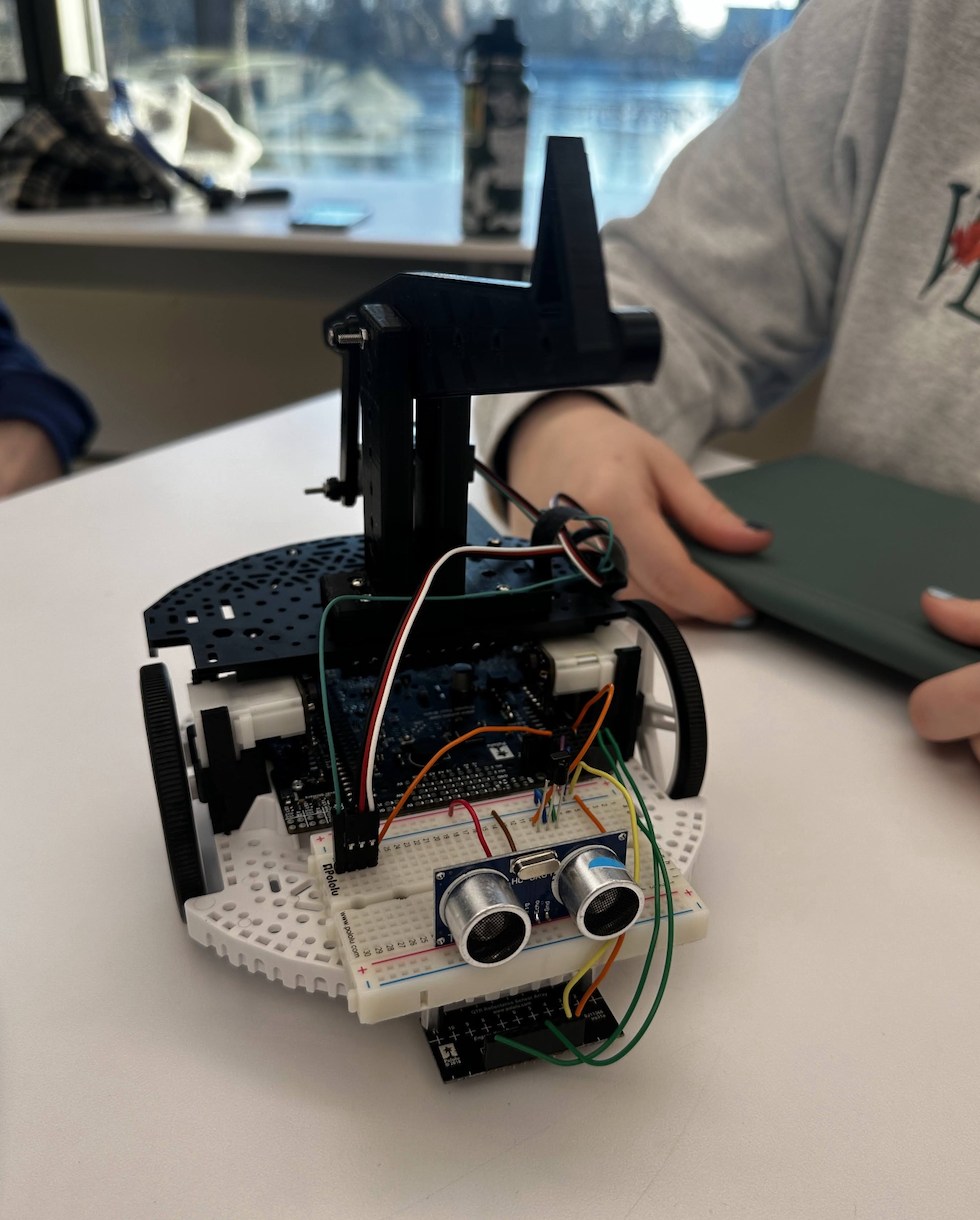
This project focused on building an autonomous firefighting and rescue robot using an Arduino Uno. The robot was designed to navigate through a mapped environment, locate simulated fires, extinguish them, and rescue small objects representing people. I used a combination of flame sensors, ultrasonic rangefinders, and line sensors to allow the robot to detect fire, follow paths, and avoid obstacles. A small fan was activated when the robot detected a fire, and a servo arm was used to scoop up and transport "people" to a designated hospital zone. I also incorporated an IR remote for starting/stopping behavior and multiple LEDs to visually display the robot’s current state. Writing the code involved managing a detailed state machine and routing system that changed the robot's behavior depending on its location and objectives. This project challenged me to think critically about real-time sensor feedback, state transitions, and physical robot navigation. It gave me a much deeper understanding of how embedded systems and robotics can be used for safety and accessibility applications. Find the full code here GitHub.